
Deli z drugimi:
3D-tiskana robotska roka za učenje
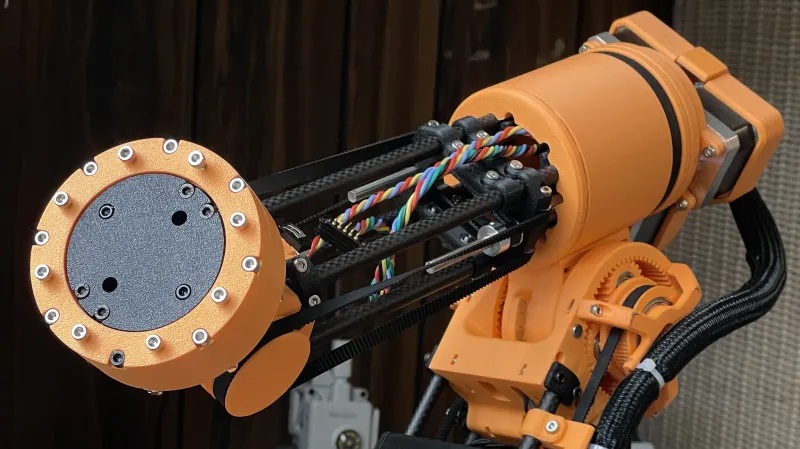
Za vse, ki se želijo poglobiti v svet robotike, nič ne premaga praktičnih izkušenj s pravo strojno opremo. James Gullberg je to »znanje« pretvoril v projekt šestosne robotske roke, ki je skoraj v celoti izdelana s pomočjo 3D-tiska. Takšna zasnova mu je omogočila eksperimentiranje z različnimi oblikami sklepov in reduktorjev, kar je ključno za razumevanje mehanskih omejitev in zmogljivosti.
Osnova robota uporablja konvencionalni planetarni zobniški prenos, medtem ko se ramenski in komolčni sklepi zanašajo na planetarne menjalnike z deljenim obročem (split-ring planetary gearboxes). Ta izbira omogoča visoko gostoto navora glede na velikost, kar je pri 3D-tiskanih komponentah izjemno pomembno. Za natančno zaznavanje položaja je James implementiral domiseln sistem z izmeničnimi magneti v izhodnem obroču, ki jih spremlja magnetni dajalnik (kodirnik).
Nadzor nad celotnim sistemom izvaja mikrokrmilnik STM32, ki komunicira z vsemi dajalniki in preko vodila CAN povezuje napravo z računalnikom Raspberry Pi. STM32 skrbi za PID regulacijske zanke in generiranje korakov za pogonske motorje, medtem ko Raspberry Pi izvaja krmiljenje na višjem nivoju s programskim skladom ROS 2 (Robot Operating System). Rezultat so tekoči in natančni gibi, ki so vidni že v začetnih testih.
Čeprav takšne naprave niso namenjene neposredni uporabi v industrijski proizvodnji, so neprecenljive za učenje. Gradnja lastne roke razvijalca nauči osnov krmiljenja, načrtovanja poti gibanja in reševanja tehničnih izzivov, kot sta zračnost v zobnikih (backlash) in upogibanje materialov. Te veščine so neposredno prenosljive v industrijsko okolje, kjer je razumevanje interakcije med programsko opremo in fizičnim strojem ključnega pomena za uspeh.
Vam je bila novica zanimiva?
Povejte prijateljem, da ste novico prebrali na Računalniških novicah.
Vas zanima več iz te teme?
robotikaPovezave
Sorodne novice




Kaj berejo drugi?




















Partnerji Računalniških novic Prikaži vse

CDS COM d.o.o.





